Research
Projects
Multi-Modal Continual Learning with Context Understanding 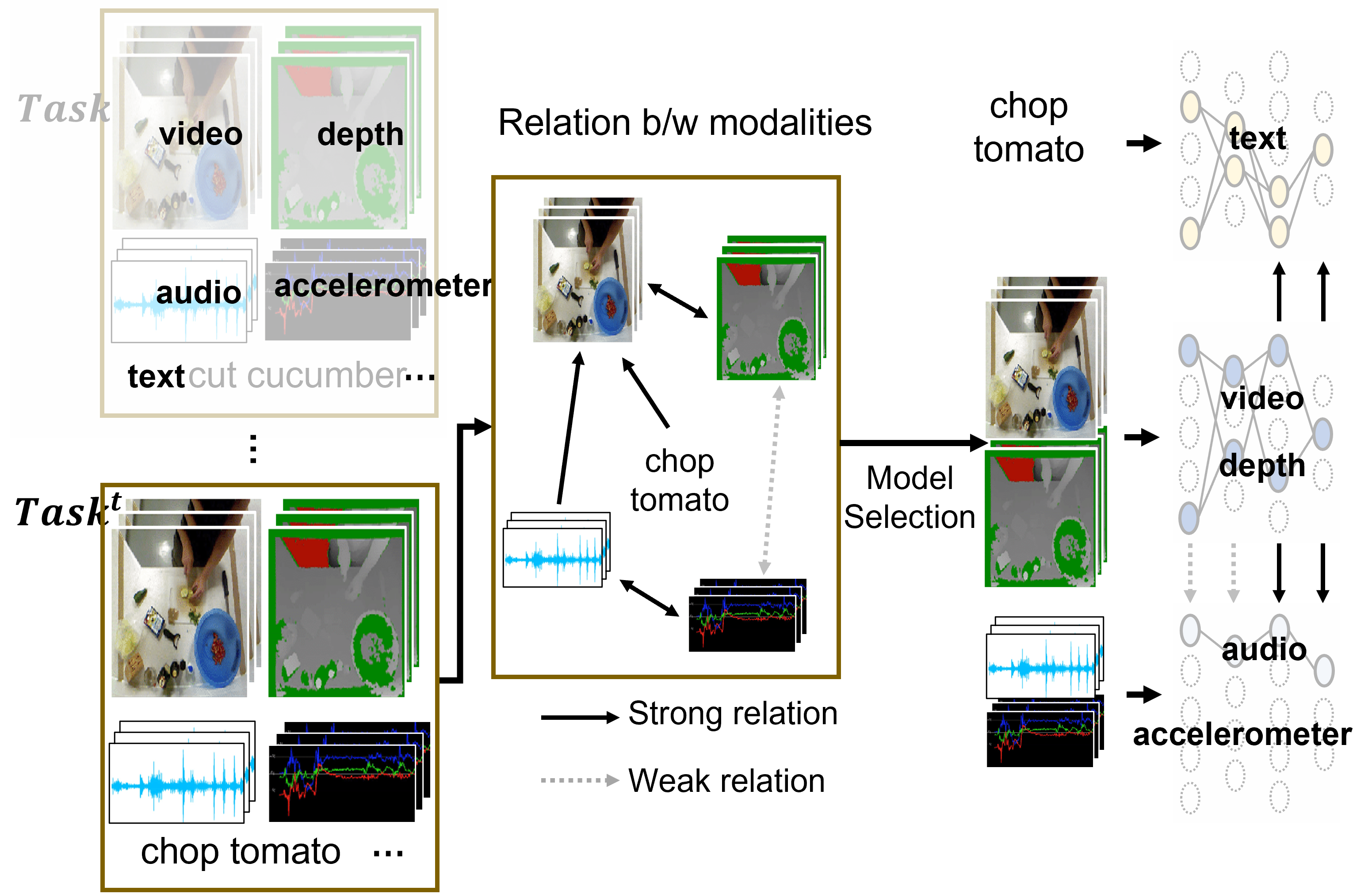
This project develops a continual learning method that exploits multi-modal inputs to learn tasks of various domains while comprehending their respective contexts.
Funded by National Research Foundation.
Development of AI for Self-Improving Competency-Aware Learning 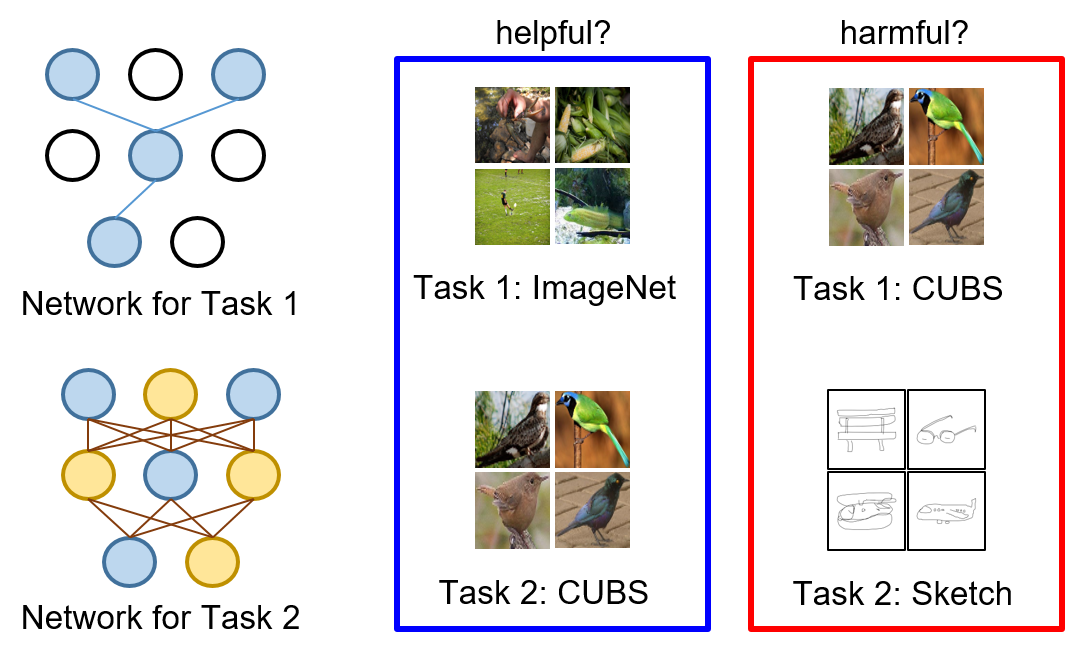
This project develops an algorithm that explores optimal models and parameters of prerequisite learning tasks suitable for new learning situations.
Funded by IITP.
Time-Series Action Prediction and Segmentation 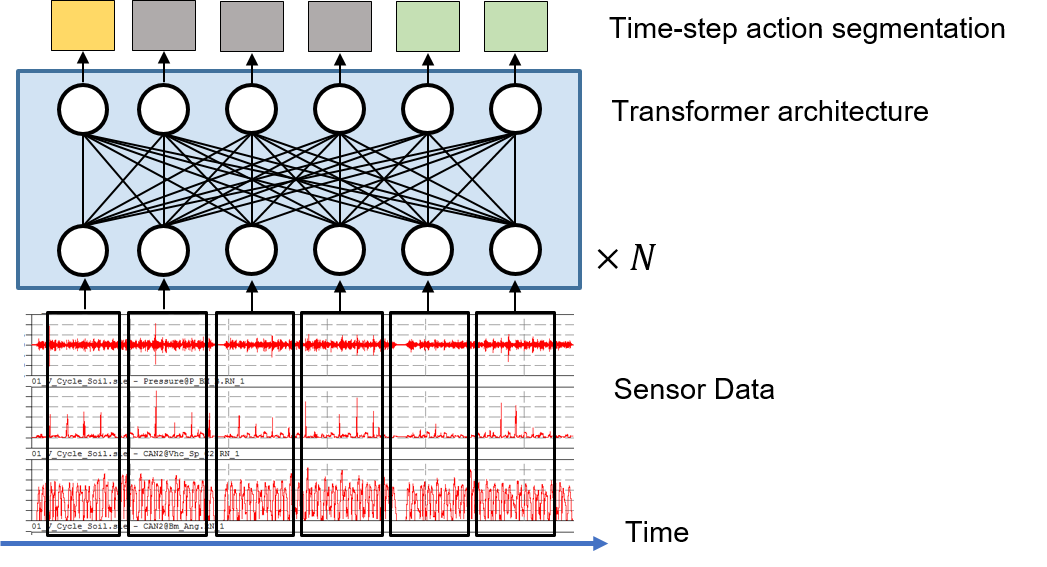
This project aims to develop high-performing deep learning models to learn and segment time-series actions for various equipments.
Funded by HD Hyundai Construction Equipment.
AI-based Fingerprint Anlysis 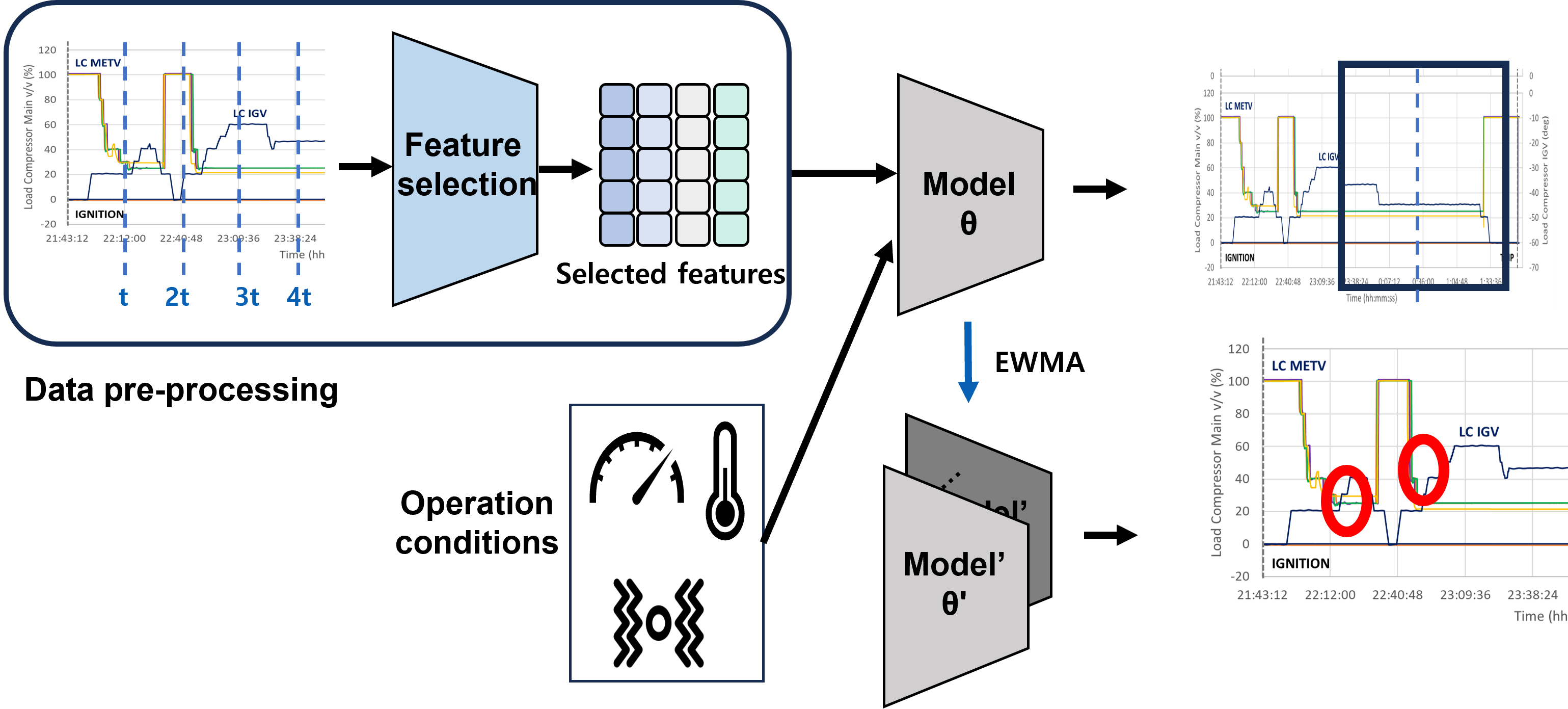
This project develops a deep learning approach to analyze and predict the operating patterns from sequential data.
Funded by Doosan Enerbility.
Past Projects
Learning Transferable Task Knowledge and Planner for Service Robots 
This project aims to develop an object-oriented framework to learn transferable knowledge and task hierarchy for task planning of a robot.
Funded by Samsung Research Funding & Incubation Center.
Automated Deep Learning Technology for Multi-Task Learning 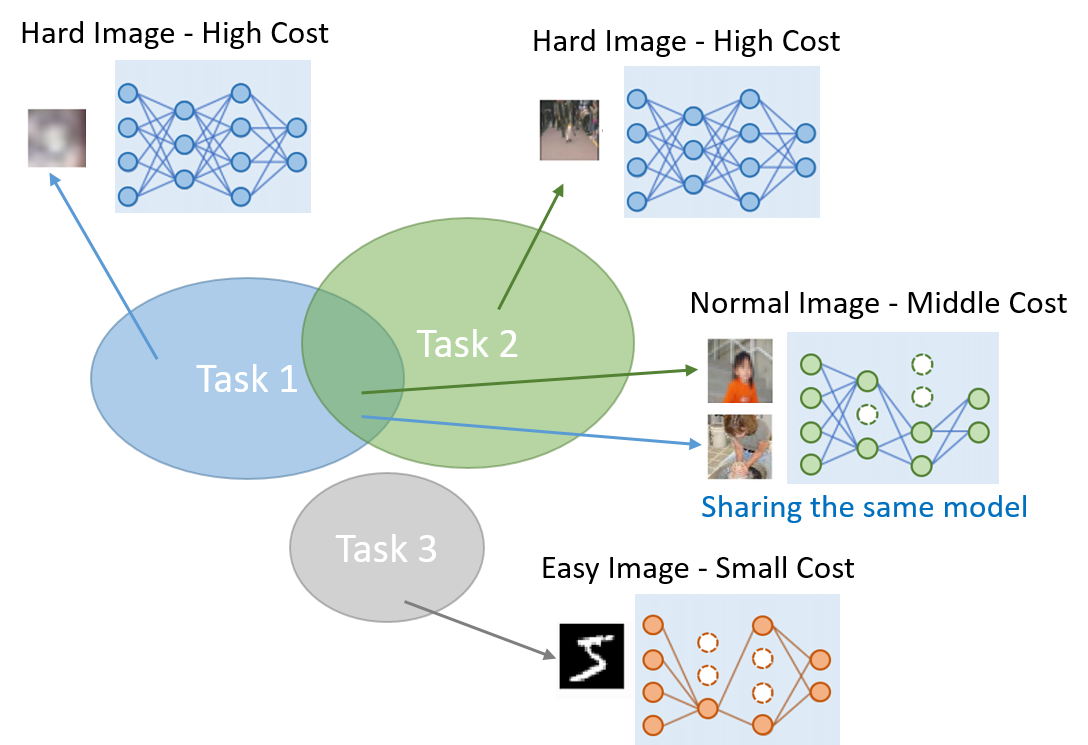
This project aims to develop versatile deep learning approaches to perform multiple tasks on devices of limited capacity while avoiding task interference and model redundancy.
Funded by National Research Foundation.
Customized Neural Architecture Search and Proposal 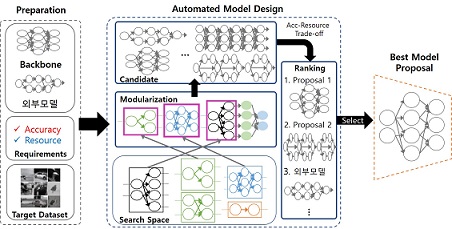
This project aims to develop customized neural architecture search technology for visual tasks.
Funded by Samsung SDS.
Deep Embedding Technology for Analysis of Visual Memory Similarity 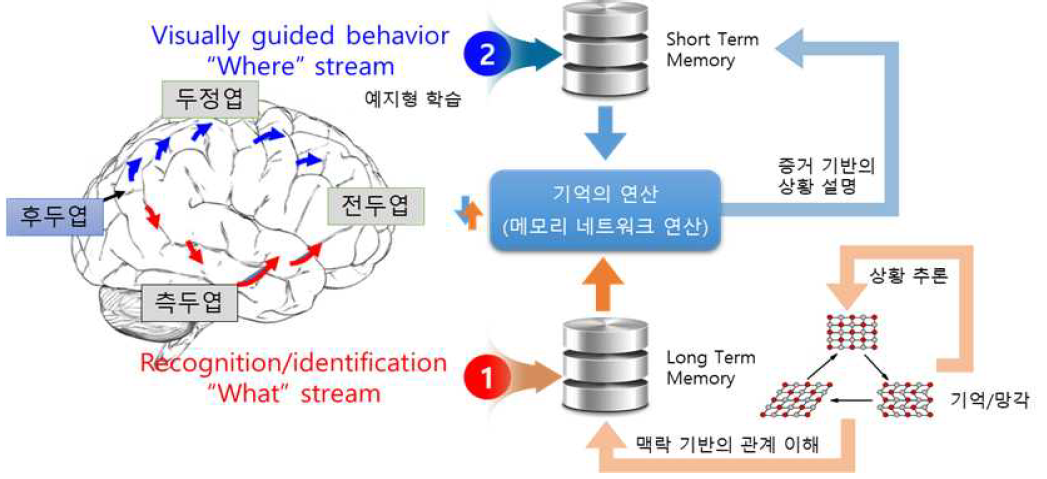
This project investigates the similarity of visual memory of similar tasks based on machine learning-based embedding algorithms.
Funded by ETRI.
Vision Intelligence based Construction Safety Management System 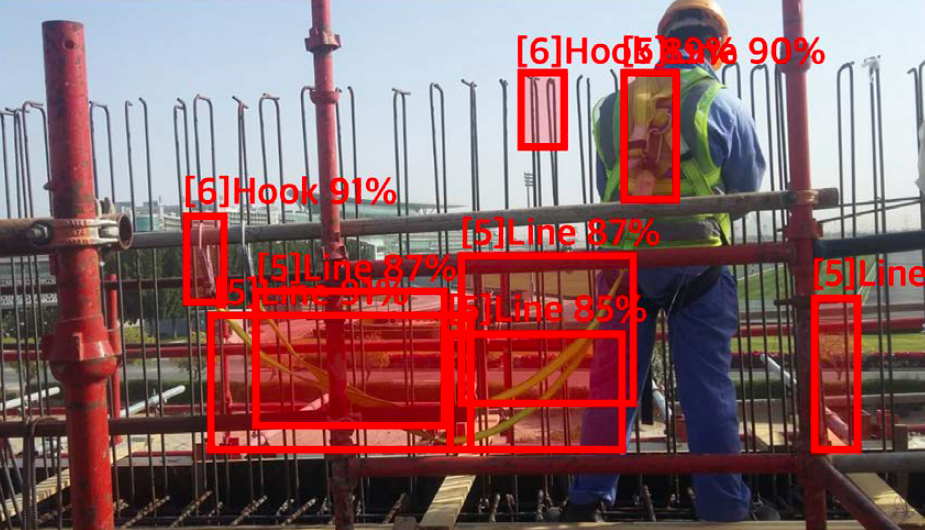
This project aims to develop a video surveillance system in construction sites by analyzing potential risks and hazards, collecting visual data, and developing machine learning based risk-identification algorithms.
Funded by National Research Foundation (Basic Research Lab).
Pose Estimation for Bin-Picking with a 3D Model 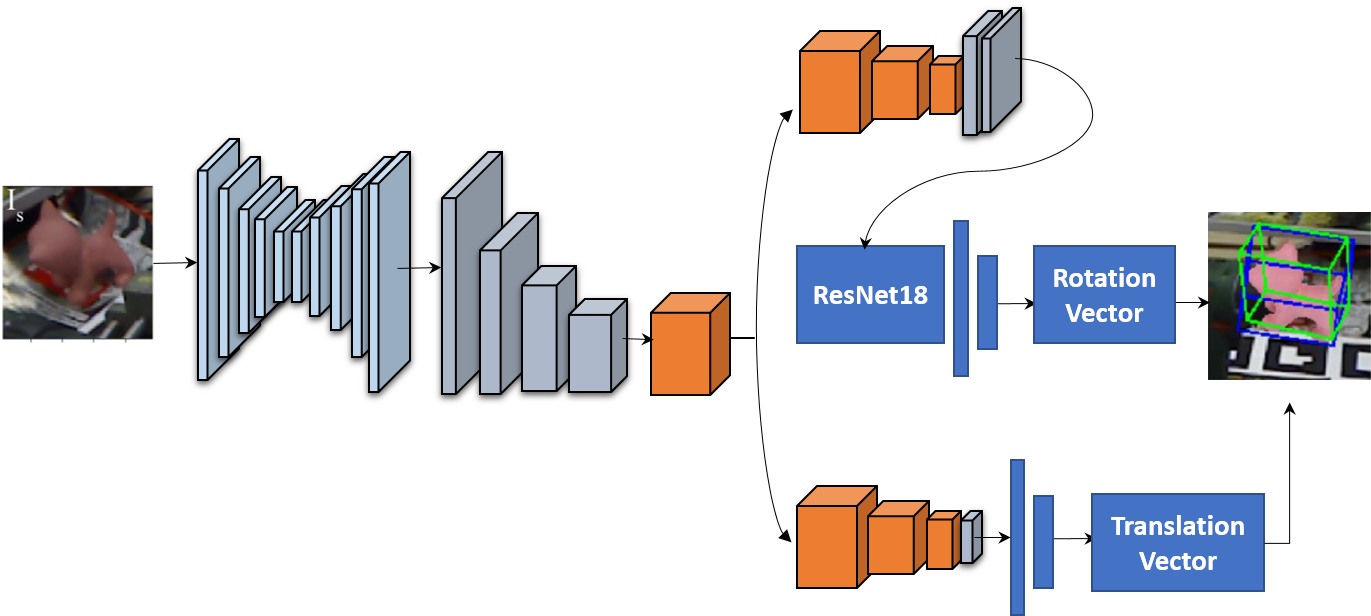
This project develops exact 6D pose estimation and instance segmentation algorithms for a bin-picking problem of a robot.
Funded by Doosan Digital Innovation.
StreetWise 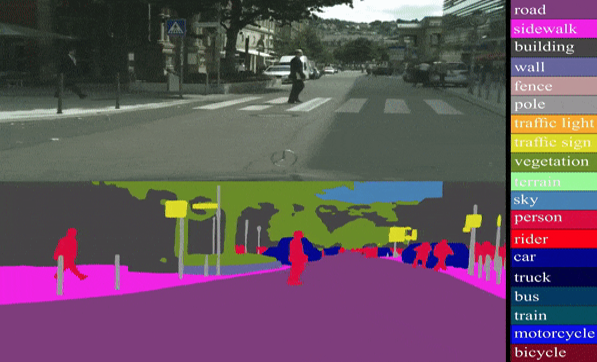
The project aims to develop the technology and service needed to operate autonomous cars on normal public roads in an urban environment, aimed primarily at individuals that currently drive their commute to and from work.
Funded by UK Research and Innovation.
On-the-fly Machine Learning for Evolving Intelligent CPS 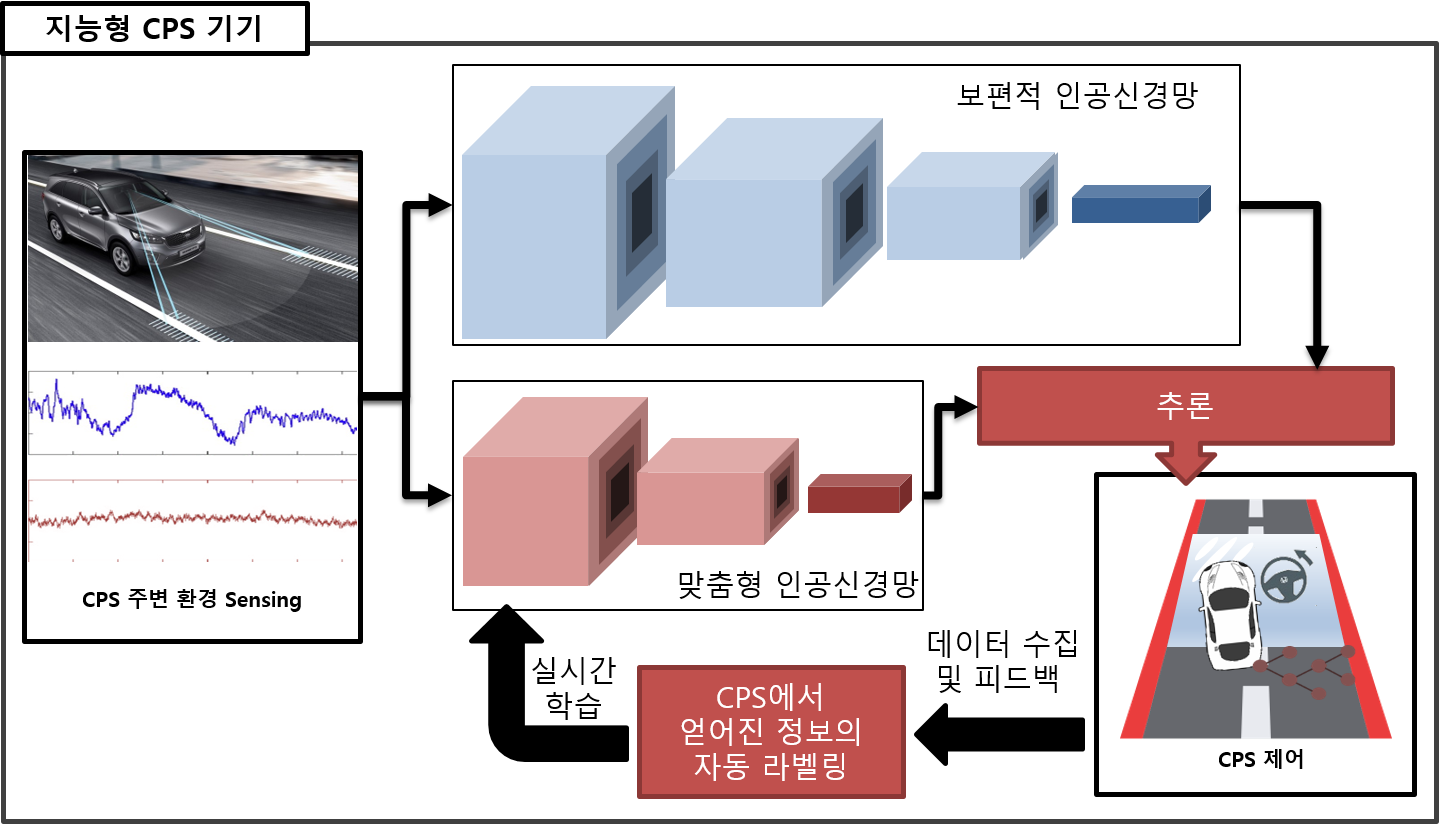
This project develops on-the-fly machine learning algorithms using deep learning frameworks to realize personalized and environment adaptive learning.
Funded by Ministry of Science and ICT (MSIT).
Human-Level Lifelong Machine Learning 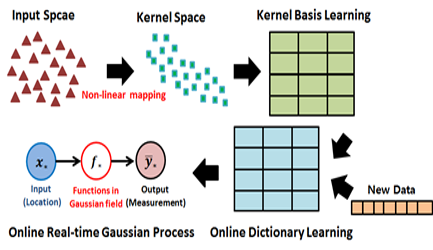
This project develops novel algorithms and methods for real-time nonparametric learning and prediction of time-varying stochastic processes.
Funded by Ministry of Science, ICT, and Future Planning (MSIP).